

Robotics Breakthrough: Handy Robot That Can Crawl and Pick Up Objects
Robotics research continues to push the boundaries of what machines can do, and a recent breakthrough reported in Nature Communications has captured global attention. Scientists have developed a robot that can crawl and pick up objects, redefining how robots interact with their environment. Unlike traditional robotic arms or wheeled machines, this innovative system combines mobility and manipulation in a single compact design, opening new possibilities for robotics in confined, complex, and unpredictable spaces.
This development marks a significant step forward in robotics, where flexibility, adaptability, and efficiency are becoming just as important as strength and precision. In this article, we explore how this handy robot works, why it matters, and what it could mean for the future of robotics across industries.
Understanding the Handy Robot Concept
Most robots today fall into two main categories:
- Manipulators, such as robotic arms that can pick up and move objects but are fixed in place.
- Mobile robots, which can move around but often lack precise manipulation capabilities.
The newly developed robot that can crawl and pick up objects breaks this traditional divide. It is designed as a detachable robotic hand that can separate from its main arm, crawl independently toward an object, grasp it, and then return to its original position.
This dual capability allows the robot to extend its reach beyond physical limitations, making it especially useful in environments where standard robotic arms cannot operate efficiently.
How the Robot Works
Detachable Robotic Hand
At the core of this innovation is a robotic hand that can detach from its arm. Once detached, it functions as an independent unit capable of movement and manipulation. This design eliminates the need for complex mobile platforms or additional robotic systems.
Crawling Mechanism
Instead of wheels or tracks, the robot uses its fingers as legs. By coordinating finger movements, the robot can crawl across flat surfaces, navigate obstacles, and reach objects outside the arm’s immediate workspace. This crawling ability makes the robot highly adaptable in tight or cluttered environments.
Symmetrical Finger Design
Unlike human hands, which rely heavily on a thumb for gripping, this robotic hand uses a symmetrical finger arrangement. Each finger has similar structure and flexibility, allowing the robot to grasp objects from multiple angles. This symmetry enhances versatility and reduces design complexity.
Object Grasping and Carrying
Once the robot reaches an object, it switches from locomotion mode to manipulation mode. The fingers adjust their role, forming a stable grip capable of lifting and carrying various items. Tests have shown that the robot can handle everyday objects such as tools, containers, and cylindrical items with impressive precision.
Why This Robotics Breakthrough Matters
The development of a robot that can crawl and pick up objects is more than a novelty—it addresses long-standing challenges in robotics.
Extended Reach Without Larger Machines
Traditional robots require longer arms or mobile bases to increase their reach. This new design offers a smarter solution: instead of moving the entire robot, only the hand moves. This reduces energy consumption and mechanical complexity.
Improved Performance in Confined Spaces
Factories, warehouses, and industrial plants often contain tight spaces that are difficult for standard robots to access. A crawling robotic hand can navigate these areas with ease, retrieving items or performing tasks without disrupting surrounding equipment.
Reduced Infrastructure Requirements
Because the robot does not rely on tracks, wheels, or external mobility systems, it can be integrated into existing robotic setups with minimal changes. This makes it attractive for industries looking to upgrade automation without major redesigns.
Potential Applications Across Industries
Industrial Manufacturing
In manufacturing environments, robots frequently encounter situations where objects fall out of reach or are positioned awkwardly. A robot that can crawl and pick up objects could retrieve misplaced components, reducing downtime and improving efficiency.
Logistics and Warehousing
Warehouses rely heavily on robotic automation for sorting and handling goods. This technology could allow robotic systems to handle exceptions—items that fall, roll away, or become stuck in corners—without human intervention.
Search and Rescue Operations
In disaster scenarios, such as collapsed buildings or industrial accidents, access is often limited. A compact crawling robot could navigate through debris, retrieve tools, or deliver supplies in spaces too dangerous for humans.
Medical and Laboratory Environments
Hospitals and research labs require precise handling in controlled spaces. A detachable robotic hand could assist in retrieving instruments or samples in sterile or hard-to-reach areas, minimizing contamination risks.
Space Exploration
In space missions, flexibility and efficiency are critical. A robot that can crawl and manipulate objects could be valuable for spacecraft maintenance, equipment retrieval, or exploration tasks in low-gravity environments.
Comparison with Traditional Robotics Systems
Traditional robotic arms are highly effective within a defined workspace but struggle when objects fall outside that range. Mobile robots can move freely but often lack fine manipulation skills.
The robot that can crawl and pick up objects combines the strengths of both systems:
| Feature | Traditional Arm | Mobile Robot | Crawling Hand Robot |
|---|---|---|---|
| Precise Grasping | High | Moderate | High |
| Mobility | None | High | Moderate (Crawling) |
| Space Efficiency | Moderate | Low | High |
| Adaptability | Limited | Moderate | High |
This hybrid approach represents a shift toward more adaptive and multifunctional robots.
Challenges and Limitations
Despite its promise, the technology is still in the research phase and faces several challenges:
Autonomy and Control
Currently, demonstrations are conducted in controlled environments. For real-world deployment, the robot will need advanced autonomy, object recognition, and navigation capabilities.
Speed and Efficiency
Crawling is slower than wheeled movement. Researchers will need to optimize speed without compromising stability and control.
Durability
Frequent crawling and grasping place stress on mechanical components. Ensuring long-term durability will be essential for industrial use.
Integration with AI
To function independently, the robot must integrate advanced AI systems capable of decision-making, learning, and adaptation.
The Role of AI and Machine Learning
Artificial intelligence will play a critical role in the future of this technology. By combining the crawling robot with AI, researchers could enable:
- Autonomous navigation in complex environments
- Real-time object recognition and classification
- Adaptive grasping strategies based on object shape and weight
- Learning from experience to improve efficiency over time
This integration could transform the robot from a controlled tool into a semi-autonomous or fully autonomous system.
Implications for the Future of Robotics
The development reported in Nature Communications reflects a broader trend in robotics: moving away from rigid, task-specific machines toward flexible, adaptable systems. Robots are increasingly expected to operate in human-designed environments, which are unpredictable and dynamic.
A robot that can crawl and pick up objects aligns perfectly with this vision. Instead of forcing environments to adapt to robots, robots are learning to adapt to environments.
Conclusion
The handy robot that can crawl and pick up objects represents a significant leap forward in robotics research. By combining locomotion and manipulation in a single detachable system, researchers have created a versatile tool capable of operating in spaces previously inaccessible to traditional robots.
As development continues and AI integration improves, this technology could transform industries ranging from manufacturing and logistics to healthcare, disaster response, and space exploration. While challenges remain, the potential impact is enormous.
This breakthrough is not just about building a smarter robot—it is about redefining what robots can do and how they interact with the world around them. The future of robotics is more flexible, adaptive, and mobile than ever before.


Related Posts
Medicare, Medicaid, and Beyond: Your Guide to Public Health Insurance in the USA
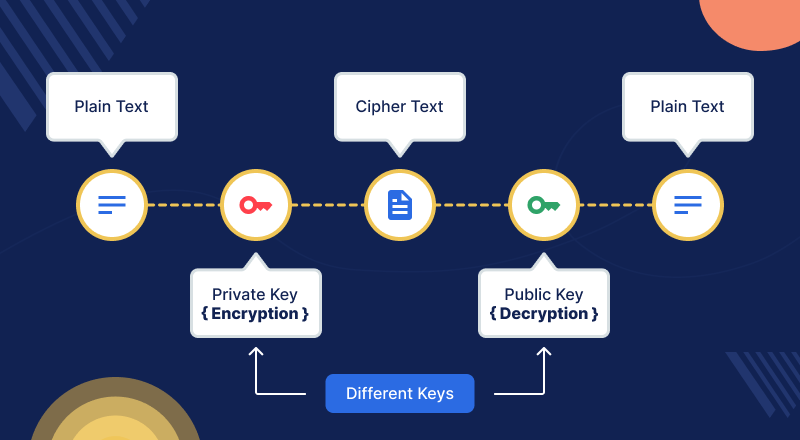
Cryptography: Developing Systems to Secure Data and Communications
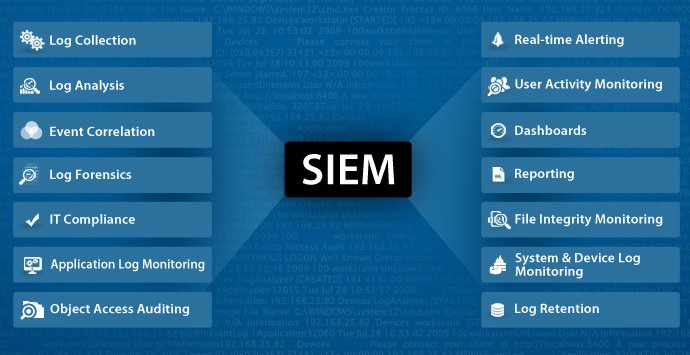
Security Information and Event Management (SIEM): Monitor and Analyze Security Logs Effectively

BOE’s Struggle with iPhone OLED Production: Impact on Apple and the Display Industry

Penetration Testing: Identifying Website and Network Vulnerabilities

Weather App Development: Building a Real-Time Weather Application Using OpenWeatherMap API
Smart Energy Management System: Optimize Energy Consumption Using IoT, Sensors, and Actuators

Wearable Device Development: Track Fitness, Health, and Environmental Data with Arduino or Raspberry Pi

Predictive Modeling Using Machine Learning: A Complete Guide for Businesses

Predictive Modeling: Using Machine Learning to Predict Customer Churn, Sales, and Business Outcomes

Data Visualization Dashboard Development: Visualizing Insights Using Tableau, Power BI, and D3.js

Social Media Platform Development Using React, Node.js, and MongoDB
Blog Website Development: Using WordPress CMS or Building a Custom Blog with HTML, CSS, and JavaScript

Predictive Maintenance: Building a Machine Learning Model to Predict Equipment Failures and Reduce Downtime
Sentiment Analysis: Building a Model to Analyze Text Data and Determine Sentiment

Image Classification: Develop a Deep Learning Model to Categorize Images

Chatbot Development: Build a Conversational AI Chatbot Using NLP and Machine Learning

Tech Industry Trends: Job market, skills in demand, and future prospects

Nanotechnology: Applications, Benefits, and Potential Risks

Change Management: Implementing Digital Transformation, Training, and Adoption
VR and AR Applications: Gaming, Education, and Enterprise Use Cases

IoT Development: Platforms, Tools, and Programming Languages

Cloud Security: Data Protection, Access Control, and Compliance

Cloud Migration: Strategies, Benefits, Challenges, and Best Practices

French Court Ruling on Apple’s Tracking: App Tracking Transparency Stands

Apple, Google Announce Multi-Year AI Collaboration Using Gemini: A New Era for AI Assistants


PTA Tax Reduction: What It Means for Mobile Users in Pakistan

Gul Plaza Fire: How a Deadly Inferno Exposed Karachi’s Safety Failures
Verizon Outage Update Critical Service Restored After 10-Hour



The Importance of Data Analytics in Business Decision-Making
The Future of Autonomous Vehicles

75 Countries Visa Pause: What It Means for Global Travel and Immigration

School Closing in USA What Parents Should Know
School Closing in USA, What Parents Should Know


The Best Smartphones for Photography in 2026: Capture Every Moment in Stunning Detail


WordPress Not Loading: Reasons and How to Fix It

How to Fix Slow Loading Issues in Google Chrome

No-Code Business Ideas That Make Millions in 2026

How to Become a Tech Entrepreneur in 2026

How to Create a Successful YouTube Channel in 2026

Best Free Video Editing Software for YouTubers in 2026

How to Make Money Online in Pakistan: Proven Ways to Earn in 2026

Top 5 Laptops for Gaming in 2026: Ultimate Picks for Every Gamer

10 Ways to Boost Your Laptop’s Battery Life


Review of the Latest Smartwatch Trends: What’s Hot in Wearable Tech

Samsung vs iPhone Cameras: Which Is Better for Photography in 2026?

How AI is Changing the Way We Live and Work: Transforming Everyday Life

How to Build a Gaming PC: A Step-by-Step Beginner’s Guide

The Best Password Manager: Secure Your Digital Life in 2026

The Future of Drones in Pakistan: Transforming Industries and Innovation

How to Speed Up Your Laptop: Simple Tips That Actually Work

The Ethics of Facial Recognition Tech: Balancing Innovation and Privacy

The Role of Tech in Disaster Management: Saving Lives Through Innovation
The Future of 3D Printing: Transforming Manufacturing and Beyond

The Best Free Antivirus Software: Protect Your Devices Without Paying

How to Protect Your Phone from Hackers: Essential Security Tips

The Top Tech Conferences in Asia: Where Innovation Meets Opportunity

The Pros and Cons of Online Shopping: A Complete Guide for Modern Consumers

The Future of Virtual Assistants: Smarter, More Human, and Everywhere
Top Tech Myths Debunked: Separating Fact from Fiction

How AI is Changing Customer Service: Enhancing Support and Experience

Pakistan Top Tech Influencers to Follow: Insights, Reviews & Innovation

Best Remote Development Collaboration Tools Software 2026

The Rise of E-Sports in Pakistan: Gaming as a Professional Career

The Impact of Technology on Pakistan Education System : Transforming Learning and Teaching

The Top Tech Companies to Work for in Pakistan: Careers, Culture, and Opportunities

How to Protect Your Data Online: Tips for Cybersecurity and Privacy

The Role of Women in Pakistan Tech Industry: Breaking Barriers and Driving Innovation
The Dark Side of Social Media: Addiction & More
Coding for Kids: Is it Worth the Hype?
The Impact of IoT on Daily Life: Transforming How We Live, Work, and Interact

Top Tech Conferences in Pakistan: Networking, Innovation, and Growth Opportunities

The Future of Electric Vehicles in Pakistan: Opportunities, Challenges, and Growth

The Best Productivity Apps for Students: Maximize Learning and Time Management
Pakistan’s Digital Payment Revolution: Transforming Commerce and Financial Inclusion


The Impact of Technology on Pakistan’s Economy

Top Programming Languages to Learn

The Rise of E-Learning Platforms: Revolutionizing Education

Human-AI Collaboration Tools: AI as a True Teammate Enhancing Productivity and Creativity

Low-Code, No-Code, and AI-Assisted Dev: Democratizing Software Development with AI-Powered Tools

Generative AI 2.0: Multimodal AI systems that combine text, visuals, code, and data, unlocking new enterprise applications
AI Governance and Regulation: Ensuring AI Transparency, Fairness, and Accountability

Humanoid Robots: AGIBOT’s Production-Ready Robots Are Changing Industries
AI in Everyday Life: How AI Is Transforming Daily Tasks and Experiences

AI in Healthcare: How Machine Learning Is Revolutionizing Patient Care

Gaming on the Go: The Evolution of Mobile Gaming
The Ethics of Technology: Balancing innovation with responsibility

Virtual Reality: Transforming the Way We Experience the Digital World

Demystifying Quantum Computing: What You Need to Know

The Role of Internet of Things in smart cities (IoT) in Shaping the Future of Cities

The Top Emerging Tech Trends in Pakistan

The Benefits and Drawbacks of Virtual Reality in Education

How Blockchain is Revolutionizing Industries Beyond Crypto currency

The Pros and Cons of Facial Recognition Technology

The Rise of Smart Homes: How Technology Is Changing the Way We Live

Cybersecurity in the Age of Remote Work: Challenges and Solutions


The Future of Artificial Intelligence: Trends to Watch

The Benefits of Microservices Architecture for Modern Applications
The Role of Artificial Intelligence in Predictive Maintenance

How Businesses Can Leverage Social Media Analytics for Growth

The Impact of Quantum Computing on Cybersecurity: A New Era of Threats

The Benefits of Serverless Computing 2026, The Architecture for Modern Applications

Why Businesses Should Prioritize Digital Transformation in 2026

The Potential of Augmented Reality in Education and Training

The Role of DevOps in Modern Software Development: Benefits and Challenges

Cloud Computing for Small Businesses: Benefits and Best Practices

The Future of Work: How Automation and AI Are Transforming the Job Market

Blockchain in Supply Chain Management: A Game-Changer for Transparency and Efficiency

Data Analytics: Unlocking Business Insights and Driving Growth

5G for Businesses: Leveraging Next-Gen Connectivity for Growth

Cybersecurity in the Age of IoT: Threats and Opportunities

The Future of E-commerce: How AI is Revolutionizing Online Shopping

Birdbuddy Smart Bird Feeder Launches at CES 2026: Birdbuddy 2 and Birdbuddy 2 Mini

Descriptive Set Theory and Computer Science: A New Bridge Links the Strange Math of Infinity to Algorithms

Most Anticipated Video Games 2026 That Gamers Can’t Wait For

Voicebuds: Subtle Launches Next Generation Earbuds for Voice Computing

Robots: Transforming the Future of Technology and Daily Life

Graphic Designing: The Art and Science of Visual Communication

Xthings Smart Home Devices at CES 2026 Redefine Home Security and Automation

SwitchBot Onero H1 Home Robot Redefines Smart Living at CES 2026

Beats Solo 4 Headphones Deal: Amazon Slashes $70 Off in All Colors

Digital Marketing Services for Small Businesses: Simply Social Media LLC Expands to Drive Growth
Why Japan’s Internet Feels Unusual to Outsiders — But Makes Sense to Locals


ASUS Unveils ROG Strix XG34WCDMS Featuring a 34-Inch 280Hz 5th-Gen QD-OLED Display

The Top Agentic AI Browsers to Watch in 2026
